MTA (Multiple Time Around) and range ambiguity can sometimes be confused because they both involve the interpretation of multiple returns in LiDAR systems. However, they are distinct concepts that arise from different scenarios.
What are MTAs?
In Riegl's terminology, "MTA" are to be interpreted as range ambiguity with "zones" that correspond to the number of points in the air simultaneously. They can also be called MPiA: Multiple Pulses in the Air.
What's a range ambiguity?
Range ambiguity arises when the pulse repetition rate of a high-frequency scanning LiDAR system is shorter than the time of flight for the laser pulse, because the LiDAR system emits subsequent pulses before the previous pulses have returned.
As a result, the returns from different objects at different distances can overlap, causing confusion in determining the true range or distance to the objects. The LiDAR system may interpret the multiple returns as if they originate from the same distance, introducing measurement errors.
 Illustration of range ambiguity.
Illustration of range ambiguity.
As MTA increase the Time-Of-Flight, they can introduce range ambiguity. In summary, MTAs, which are echoes caused by laser pulses making multiple trips, can contribute to range ambiguity when the pulse repetition rate is faster than the time of flight. In such cases, it becomes challenging to differentiate between returns from different objects, leading to measurement uncertainties and potential errors in Time-of-Flight-based LiDAR distance measurements.
To solve these, different strategies include Pulse Modulation, Waveform Processing, Full Waveform capture, Time Gating as well as Data Filtering/Processing. We won't go over them in this article, though.
MTA Zones and your YellowScan Voyager unit
It is important to maintain a coherent Pulse Repetition Rate (PRR) to minimize range ambiguities. Riegl defines "MTA Zones" or "MPiA: Multiple Pulses in the Air" that designate the amount of simultaneous points in the air and traveling between the sensor, its eventual target and the laser receiver. MTA zones depend on PRR and flying height.
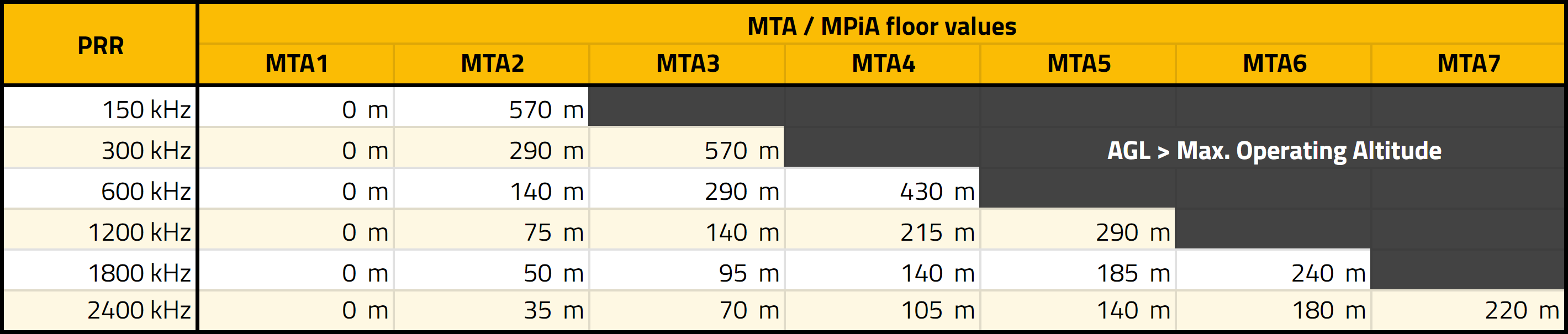
The main objective is to minimize the amount of MPiA. For example, if a planned mission requires a flight at 120m AGL, you'll want to avoid being in MTA3+, so stick with a PRR of 1200 kHz at best.
! And don't forget to match the Scan Rate in the Config.ini file as described in the User Manual, or find more explanation in this article !
N.B. In other litterature, you can find another meaning for MTA : it can also refers to the situation where a laser pulse emitted by the LiDAR device makes multiple trips, bouncing off multiple objects before returning. This can occur when the laser pulse encounters an object and reflects off it to reach another object located farther away. MTA is a beneficial feature of LiDAR systems as it allows for the detection and measurement of objects that are located beyond the direct line of sight. However, this is effectively increasing the Time-of-Flight from a laser pulse, creating a potential range ambiguity.

This is slightly different from laser echoes: MTA is a scenario where a single pulse generates multiple laser echoes by interacting with multiple objects along its path, while a single laser echo corresponds to the return signal from one interaction with a single object.