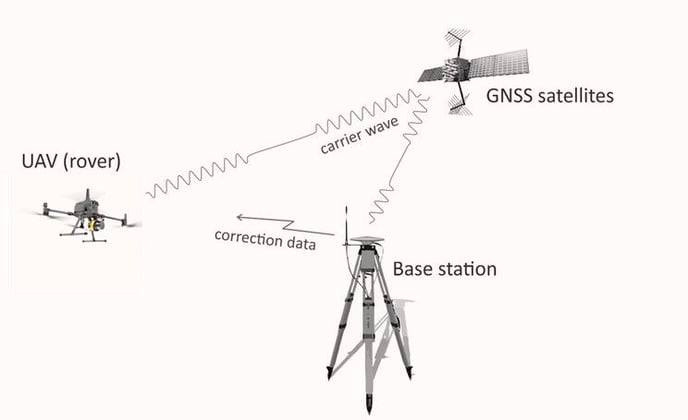
The diffenrential GNSS is a technique where a first GNSS receiver (aka "base station") sends corrections to a second GNSS receiver (aka "rover"). The goal is to compute the propagation errors on GNSS signals on the base station, and apply them on the rover (assuming that for short distance, few dozens of kilometers, these errors are identical for the base and the rover).
These corrections can be transmitted in real time (Real-Time Kinematic, or RTK) or at a later stage (Post-Process Kinematic, or PPK).
RTK methods are very popular among land surveyors, because it gives immediately the final coordinates (mandatory for stake out operations, for instance). PPK is less famous, so why has YellowScan chosen this method ?
- RTK needs a way to transmit corrections. It can be radio-modem, phone network,... which means more waves on the UAV (already loaded with several communication equipment), additional power consumption, sometime addtional cost (subscription)... and additional risks of failure, gaps,...
- During the post-processing of the trajectory in POSPac or Qinertia software regarding wich INS is embeded in your YellowScan product, inertial data need to be reprocessed. Even if the positions were logged in RTK, in order to get the best of the Inertial Navigation Systems (INS), it is anyway mandatory to reprocess the inertial data (for any YellowScan product). Adding differential GNSS processing doesn't add much to the inertial post-processing.