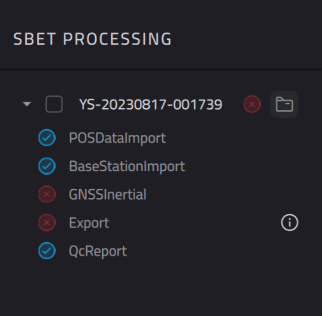
When processing the trajectory within CloudStation, you get this error at the end of the processing :
If processing with POSPac, you would get an error similar to this : The Forward processed trajectory (PNAV, in green) would usually look very inconsistent with the real-time trajectory (RNAV, in pink):
The Forward processed trajectory (PNAV, in green) would usually look very inconsistent with the real-time trajectory (RNAV, in pink):

- In both case, open the QC report, and check the graph named "Real-time trajectory, Reference Frame / Altitude"
If the altitude presents a long time on the ground before or after landing, then the solution might be to simply trim the trajectory.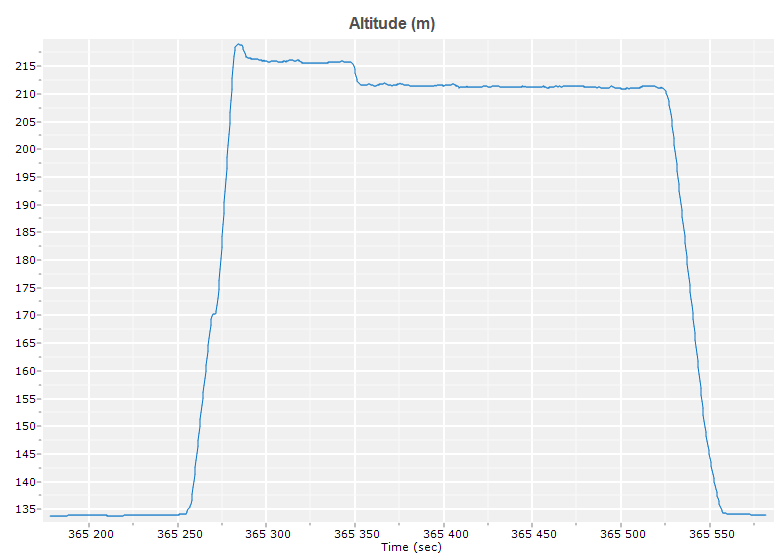
- Note the take-off and landing time:

(you can zoom to get a more precise timing) :

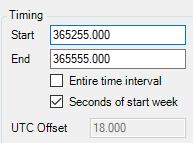
- To adjust the time range, you'll need to process the trajectory in POSPac. Start the porcessing as usual (see your POSPac User Manual). But before to launch the GNSS-Inertial Processor, go to Project Settings / GNSS-In Fusion / Timing and enter the timing entered previously.
- Continue the processing as usual (see your POSPac User manual). The GNSS-Inertial Processor should proceed till the normal end, and the Post-processed trajectory (SBET in green) would be close to the Real-time trajectory (RNAV, in pink).

- Export the sbet solution, and use the sbet in CloudStation .